













کوادکوپتر چیست؟
کوادکوپتر (به انگلیسی: Quadcopter یا Quadrotor) بالگرد گردنده بالی است که نیروی بَرآ (بالابرنده)ی آن به کمک چهار پروانه عمودی عمل می کند. این پهپاد کوچک دارای مصارف متعدد است و برای مطالعات تحقیقی و جستجو کاربرد دارد.
آشنایی
کوادکوپتر (به انگلیسی: Quadcopter یا Quadrotor) بالگرد گردنده بالی است که نیروی بَرآ (بالابرنده)ی آن به کمک چهار پروانه عمودی عمل می کند. این پهپاد کوچک دارای مصارف متعدد است و برای مطالعات تحقیقی و جستجو کاربرد دارد.
")
ساختمان یک کوادکوپتر
کوادکوپتر از چهار موتور که چهار پروانه ثابت بر آن سوار شده تشکیل یافته و هر جفت پروانه در خلاف جهت هم حرکت می کنند و ریزکنترلگر آن جهت چرخش را به وسیله کنترل زمین تنظیم می کند. با کم و زیاد کردن سرعت چرخش پروانه ها، گشتاور نیرو تغیر کرده و حرکت و یا فرود و اوج آن کنترل می گردد. از طرف دیگر وزن کم آن و متمرکز شدن آن وزن در یک نقطه کوچک، حساسیت زیادی را در کنترل چرخش پروانه ها نیاز دارد.
چرخش پروانهها
کنترل بشکل H و N


تاریخچه
تاریخچه ساخت بالگرد چهار پروانه ای به سال ۱۹۲۰ میلادی برمیگردد. در آن سال Étienne Œhmichen اولین بالگرد چهارپره را اختراع نمود. این بالگرد از روش تنظیم X بهره می جست. بالگرد دیگری در سال ۱۹۲۲ توسط Bothezat و درسال ۱۹۵۶ توسط Convertawing ساخته شده است.
در سال های اخیر توجه مراکز دانشگاهی به طراحی و ساخت پهپاد های چهارپره جلب شده است و مدل های مختلفی در دانشگاه استانفورد و کورنل ساخته شده است و بتدریج رواج یافته است.
کاربردها
با نصب دوربین ویدیویی بر روی آن، تصویر برداری از سطح میسر می گردد و از آن در امور کنترل ترافیک، فیلمبرداری، نقشه برداری و ... استفاده می شود.
")
منبع اصلی: ویکیپدیا





 28 بهمن ماه 1404
28 بهمن ماه 1404
چگونه میتوان خلبان شد؟ 2 فروردین ماه 1404
2 فروردین ماه 1404
معماری فرودگاه: طراحی و تاثیر آن بر تجربه مسافران و عملکرد فرودگاه 24 بهمن ماه 1403
24 بهمن ماه 1403
معرفی 5 شبیهساز پرواز 11 آبان ماه 1403
11 آبان ماه 1403
لباس فضایی چیست؟ چرا فضانوردان به لباس فضایی نیاز دارند؟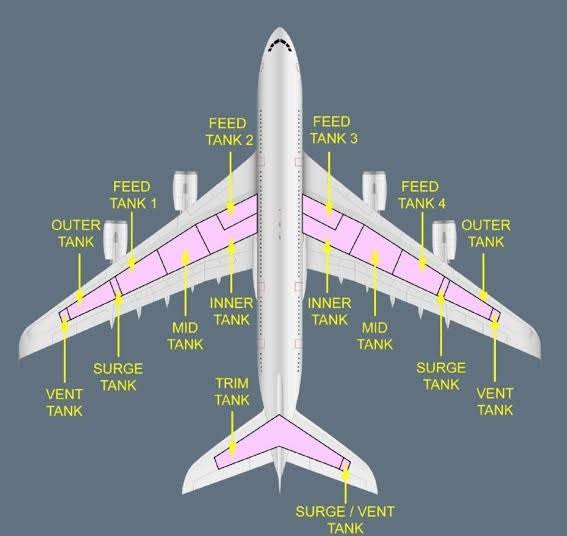 22 شهریور ماه 1403
22 شهریور ماه 1403
مخازن سوخت هواپیما 22 شهریور ماه 1403
22 شهریور ماه 1403
سوخت هواپیما چیست و انواع آن کدام است؟ (+کد سوخت)


-
مهدی | 26 آذر ماه 1402
میخواهم بتوانم هواپیمای کنترلی را بسازم و درس های از آن بیاموزم